
Programmierwettbewerb für
Schülerinnen und Schüler
Oktober 2025 – Juni 2026
Programmierwettbewerb für
Schülerinnen und Schüler
Oktober 2025 – Juni 2026

Ich möchte natürlich die Gems finden. Punkt. Nun sehe ich sie aber leider nicht immer sofort, weil sie entweder hinter einer Wand sind (vgl. Stage-1), oder meine Sichtweite zu kurz ist (Stage-2). Dafür empfange ich nun ein Signal von jedem Gem, klingt erst einmal prima. Leider empfange ich aber nur das Summen-Signal aller Gems. Mein Ziel ist es nun, in möglichst wenigen Ticks aus dem Summen-Signal (mehr oder weniger) exakt auf die Gems zu schließen.
Meine wesentlichen Annahmen sind:
Mutmasslich habe ich jetzt weitere Ausnahmen noch übersehen…
Im Weiteren betrachte ich nur die Signale und ignoriere den Gegner.
Das ist die typische Ausgangssituation. Mein Bot kennt die Welt noch nicht, empfängt noch kein Signal und läuft erst einmal los.
Hier am Beispiel des Seed: 1stwf2zdx0.
Hinweise:
Also dann mal los! Hier die Situation bei Tick 18. Seht Ihr was? Mein Bot sieht nur ein paar Wände und Böden, sonst nichts…

Wow! In Tick 19 taucht ein Signal auf! Das sieht dann so aus:

Aber was mach ich jetzt nur damit? Okay, der naheliegende Gedanke ist ja, sich alle möglichen Positionen des Signals auszurechnen.
Ich schlage also vermöge der Umkehrfunktion:
$distance = signalradius * \sqrt{1.0 / signallevel - 1.0}$
einen Kreis um mich und finde ein paar Kandidaten, die ich auch in Tick 20 sehen kann:
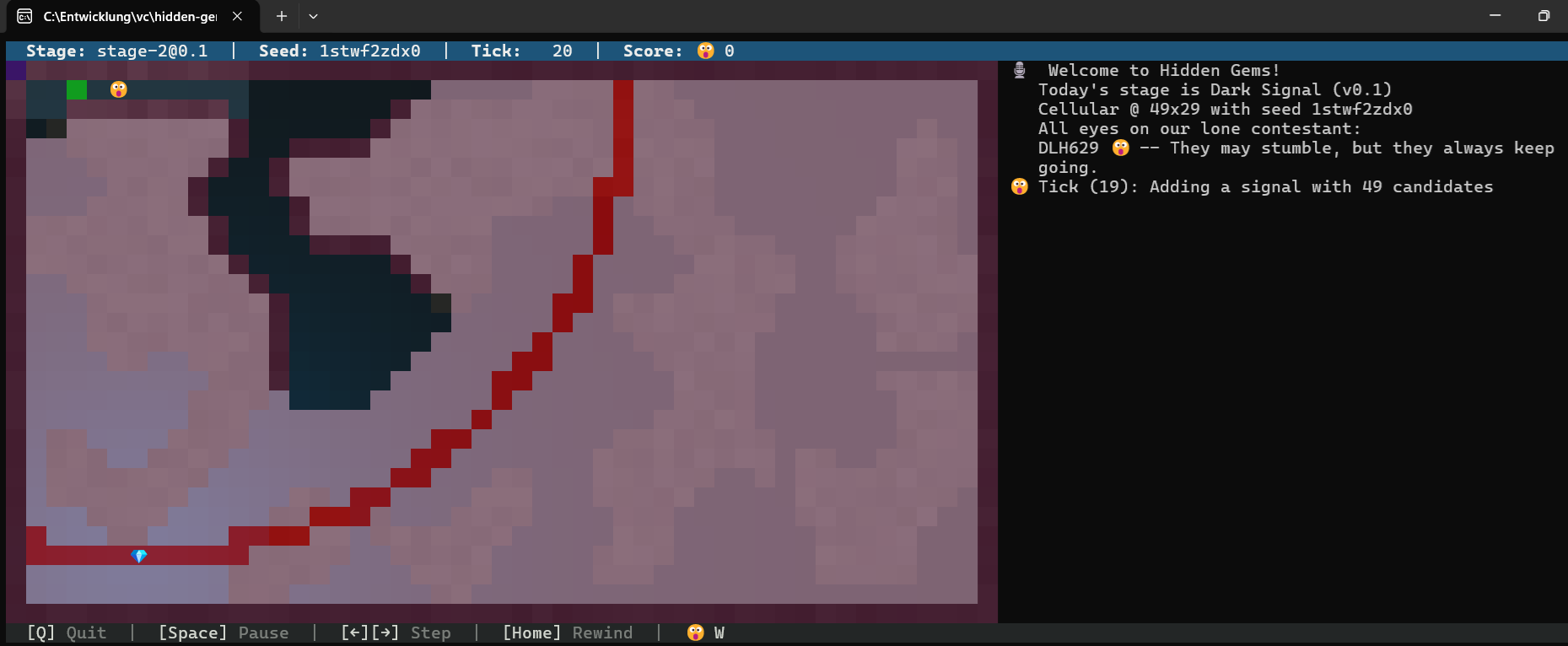
Sieht schon einmal gar nicht so schlecht aus, oder? Immerhin ist der Gem schon einmal im “Empfangskreis” und der Code für diesen Kreis ist trivial:
// calculate a new circle
static const double pi2 = 2 * std::numbers::pi;
static const double pi144 = std::numbers::pi / 144.0;
Circle circle;
for (double phi = 0.0; phi < pi2; phi += pi144)
{
double x = (double)mBotPerception.mPosition.mX + mBotPerception.mDistance * sin(phi);
double y = (double)mBotPerception.mPosition.mY + mBotPerception.mDistance * cos(phi);
int16_t px = (int16_t)std::llround(x);
int16_t py = (int16_t)std::llround(y);
if (px > 0 && px < mMaxX && py > 0 && py < mMaxY)
{
Position pos(px, py);
if (mBot.GetTileState(pos) != OCCUPIED)
{
circle.mCircumference.insert(pos);
}
}
}
Aber möchte ich so eine Situation wirklich? Mit 49 Kandidaten im Unbekannten? Nein!
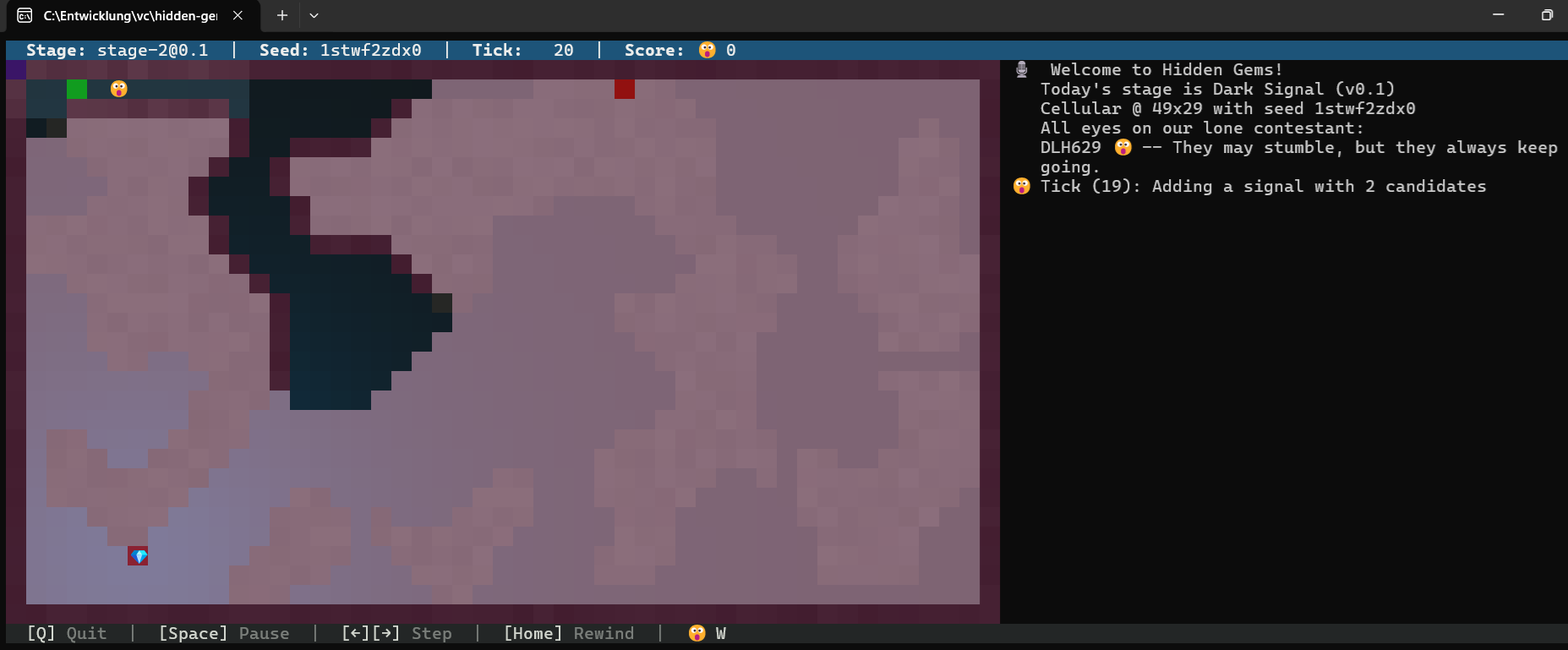
Das Ziel muss ja sein, möglichst schnell (im Sinne von Ticks) das Signal bzw. die Signale eindeutig zu identifizieren, denn nur dann kann ich die identifizierten Signale sicher von der Signal-Summe abziehen.
Also noch einmal von vorne, diesmal mit Filterung. Bemerkt bitte, dass es derselbe Tick 20 ist. Nun habe ich anstatt 49 nur noch 2 Kandidaten und der Gem ist immer noch im Visier:
Was macht mein Filter da eigentlich? Nichts Besonderes! Er rechnet nur von allen Kandidaten rückwärts, diesmal aber mit der Formel:
$signallevel = 1.0 / (1.0 + (distance / signalradius)^2)$
Das eigentliche Problem ist ja die Diskretisierung der möglichen Tiles vermöge der Rundung der exakten Positionen am Anfang der Kreis-Bildung, da geht zunächst sehr viel Information “verloren” und dadurch ensteht ja der große Kreis erst überhaupt! Man könnte nun annehmen, dass bei der Rückwärtsrechnung alle Tiles des Kreisumfanges auch meinen Bot wieder treffen, dem ist aber nicht so, denn ich runde ja wieder. Diesmal aber nicht die Distanzen, sondern die Signal-Level:
// now do the opposite since I've rounded
SignalPositionSet tmp;
auto it = circle.mCircumference.begin();
int64_t botlevel = std::llround(mBotPerception.mLevel * 1000000.0);
int64_t circleposlevel;
for (;it != circle.mCircumference.end(); ++it)
{
SignalPosition pos(it->mPosition);
pos.mDistance = it->mPosition.EuclideanDistance(mBotPerception.mPosition);
pos.mLevel = 1.0 / (pow(pos.mDistance / mSignalRadius, 2) + 1.0);
circleposlevel = std::llround(pos.mLevel * 1000000.0);
// select a margin
if (std::abs(circleposlevel - botlevel) < 2)
{
tmp.insert(pos);
}
}
circle.mCircumference = tmp;
Wie man am Code erkennt, ist auch noch eine gewisse Marge darin, der Filterparameter sozusagen. Jeder Kandidat auf dem Kreisbogen, der diese Bedingung nicht erfüllt, fliegt raus!
Ein Wort zur Warnung: Es kann natürlich vorkommen, dass alle Tiles des Kreisbogens ausgefiltert werden. Das wäre dann extrem blöde, muss ich also noch abfangen. Mutmasslich ist auch das der Grund, weshalb sich neulich in einem Sparring mein Bot mitten in der Runde sang und klanglos verabschiedet hatte…
Das ist wirklich eine interessante Frage! Meine Idee ist, dass je weniger Signal-Kandidaten ich (pro Tick) habe, desto weniger muss ich prüfen. Mir ist schon klar, dass das auch ohne Filterung ab einem gewissen Tick funktionieren würde. Nur haben wir leider nicht besonders viele Ticks und am Ende ist auch noch einen Gegner dabei…
Nein im Ernst, mit diesem Filter habe ich bereits in Tick 21 den Gem genau im Unbekannten eingekreist, leider noch nicht getroffen:

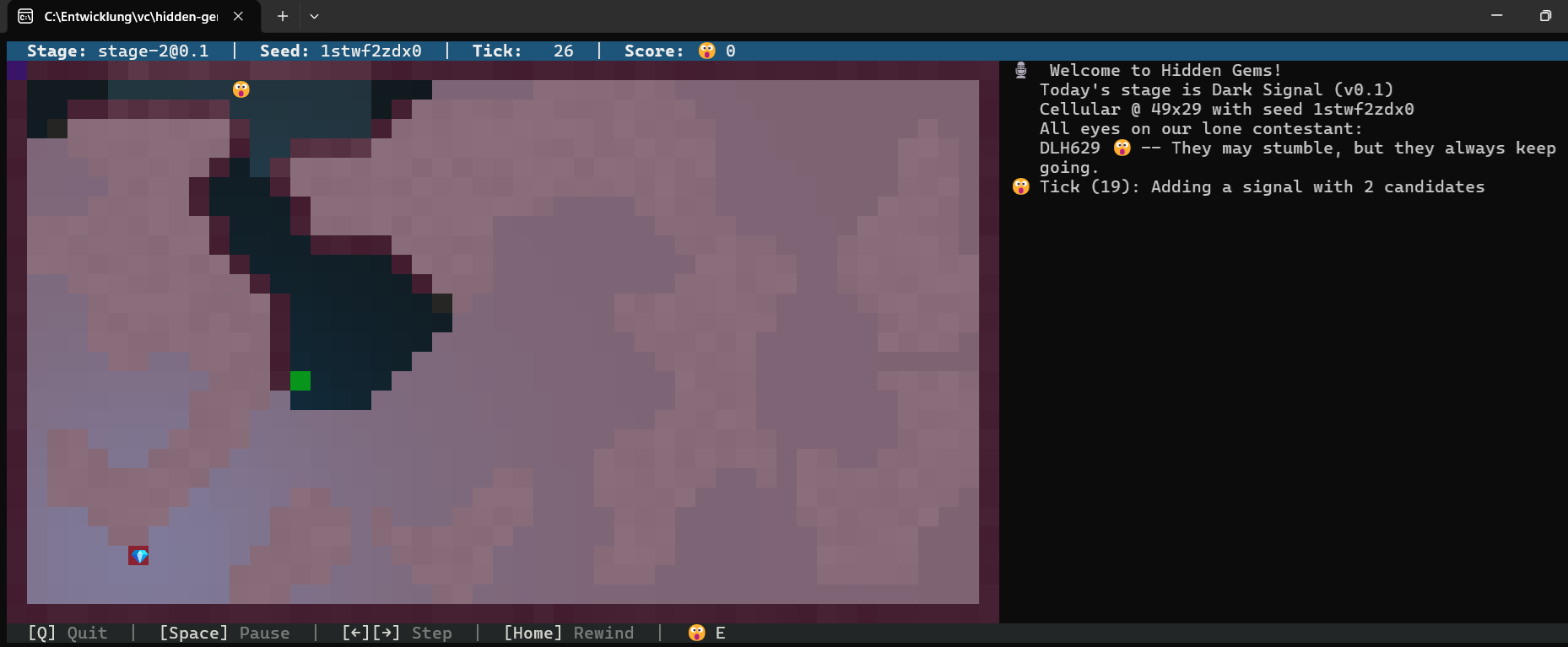
Schaut mal auf meine Area in Tick 26. Ich kenne nur diesen ersten Gem, mein aktuelles Ziel geht schon einmal in seine Richtung und ich spüre bereits eine Signal-Änderung…
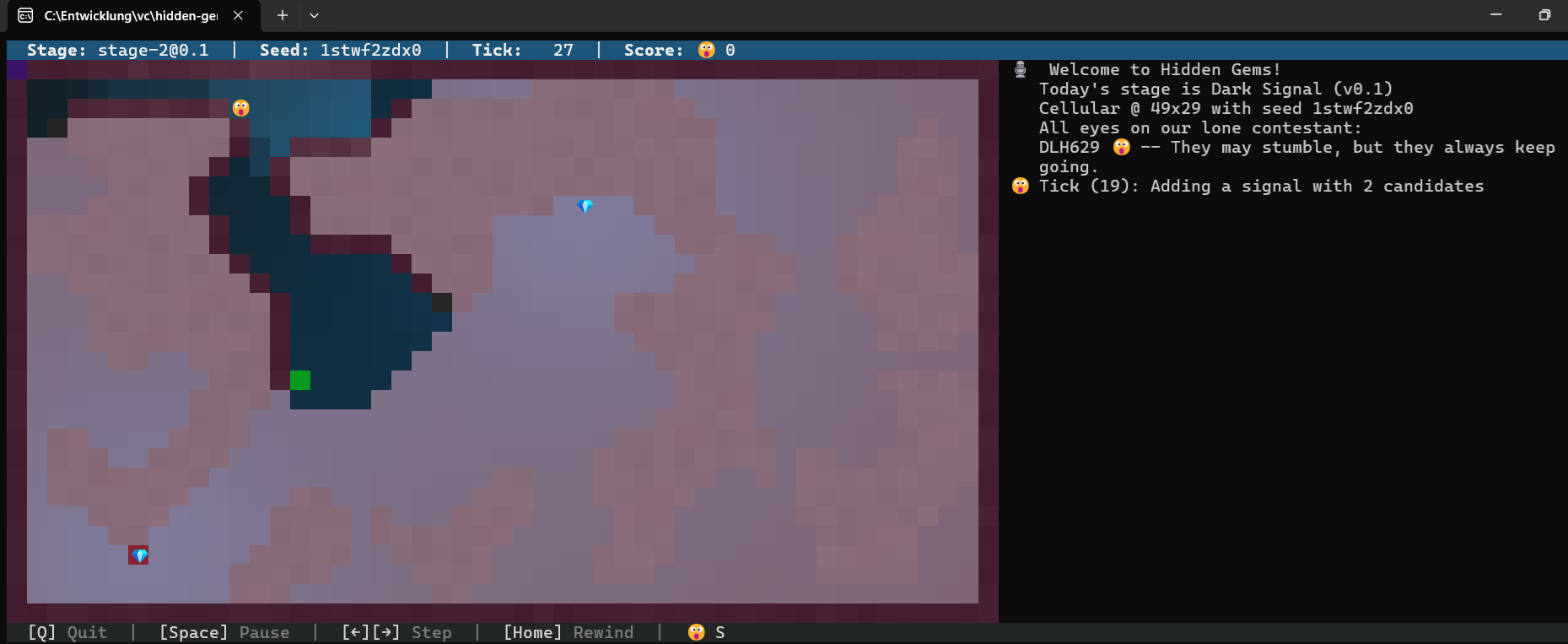
… und Zack! Im Tick 27 sehe ich den neuen Gem auch in der Area:
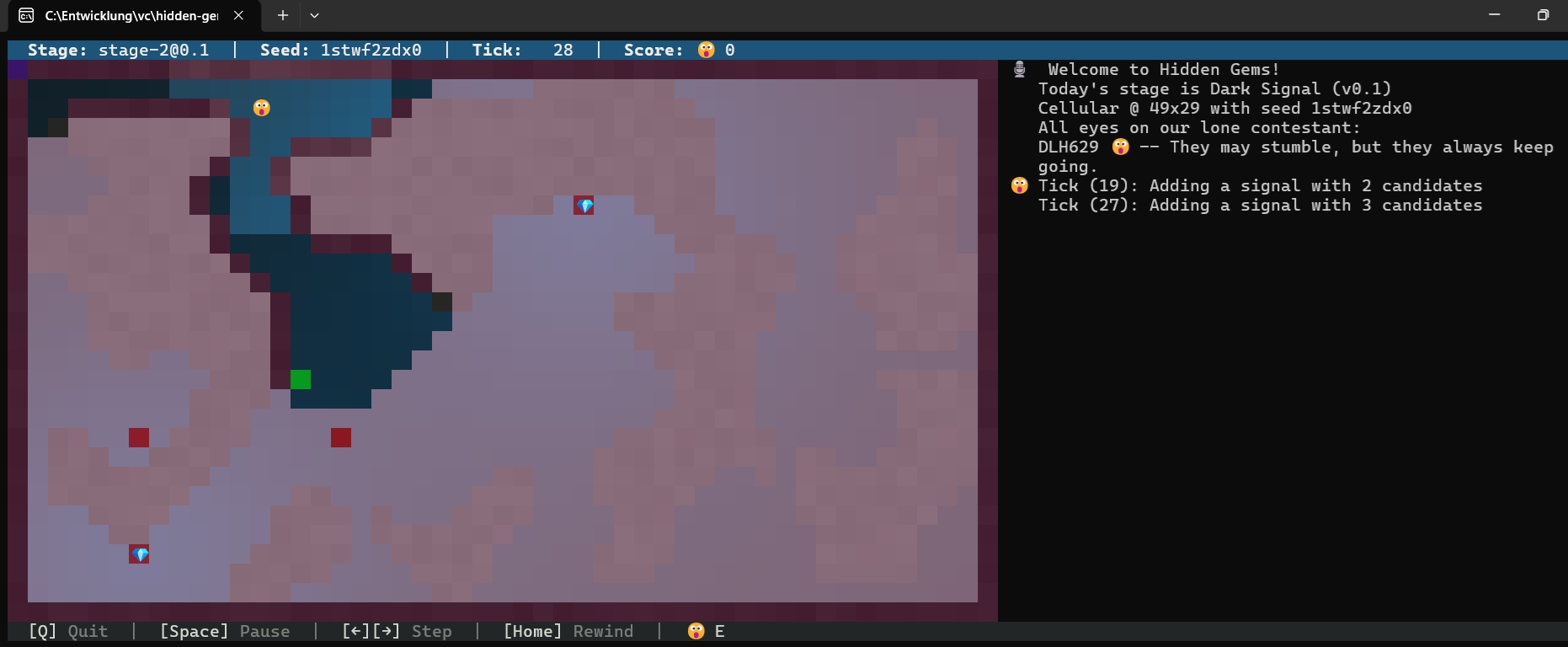
… nächster Tick 28. Es gibt 3 neue (bereits gefilterte) Kandidaten…
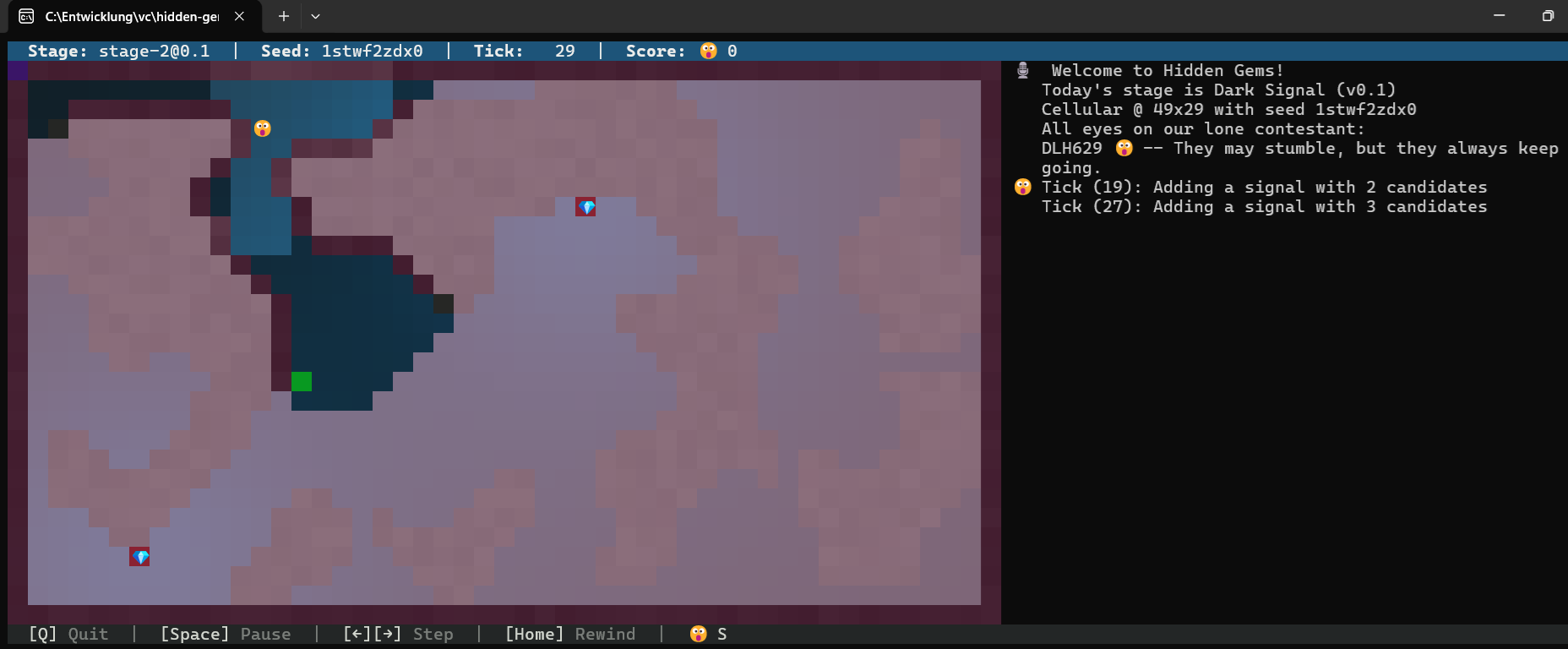
Tick 29: Nun habe ich exakt 2 Kandidaten für 2 Signale:
Meine ganz ehrliche Antwort ist: Ich weiß es nicht!
Den Suchraum möglichst schnell einzugrenzen halte ich allerdings schon für sinnvoll. Zumal erst dann m.E. eine Substraktion der bekannten Signale von dem Summen-Signal möglich ist.
Sollte dies gelingen, ist der Rest ja nur noch die richtige Pfadplanung…
Happy Coding!
Michael (a.k.a. Buffo)